So, what to say. I can't just build and fly quadcopters. As usual I have to create something that makes me gain knowledge or create almost the same solution ...
So the previous quad with big motors and battery became a bit heavier then I hoped for.
So I made a new quad with my Raze32 FC board. One with FPV 8x20mm motors and a sleek carbon frame.
So I been trying to build as small quadcopters as possible for a while now.
So my own design did not survive a 20m fall from a tree, how shocking :)
My First quad, why buy one when you can make one :)
There is not always a good solution to design your PCB without testing some of the more important parts or implementations ideas that haven't been tested bef...
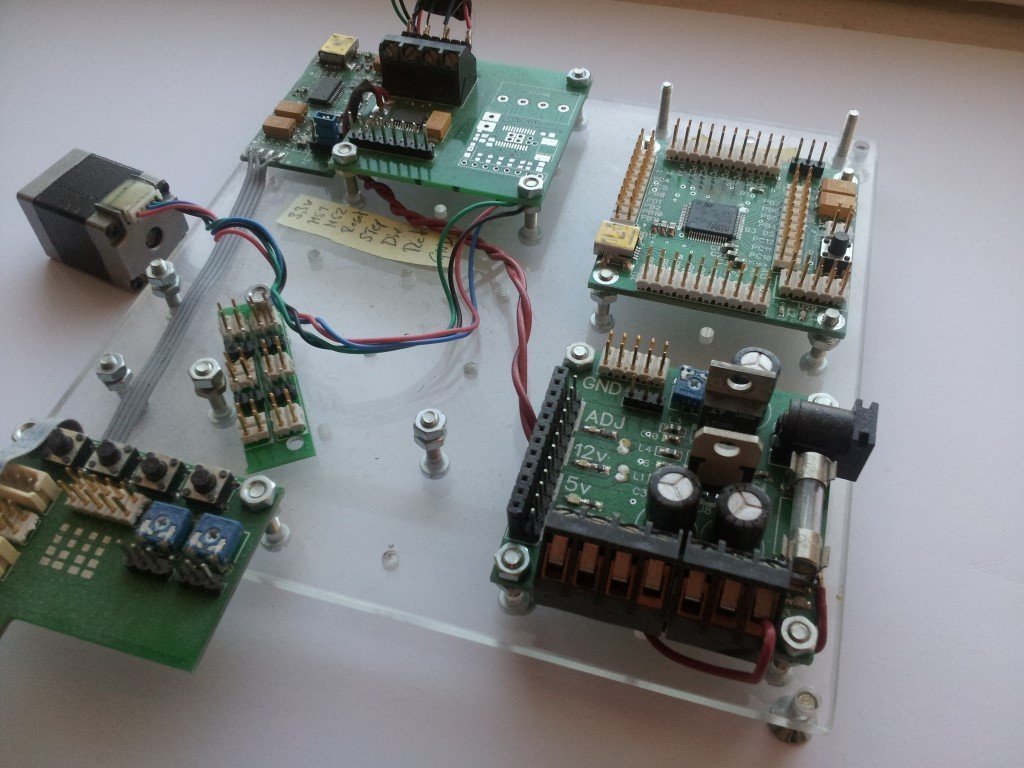
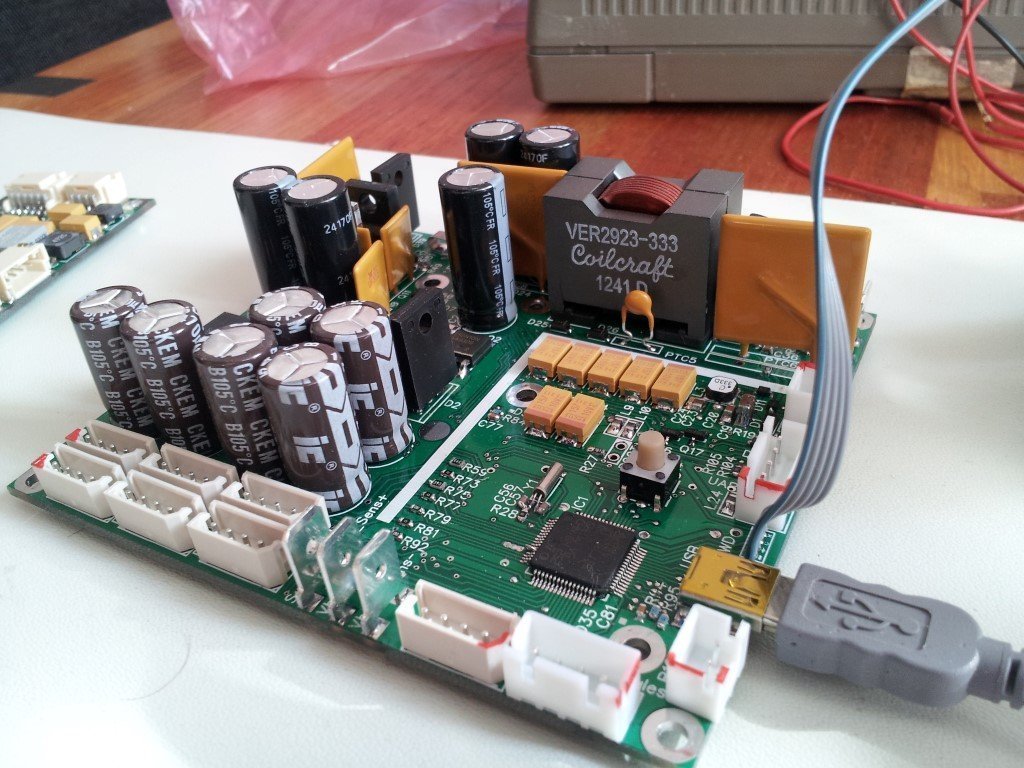
I am building my own BMS that is to be used in a segway.
I have been teaching CAD Design technique at the university for 3 years now, and i felt that the students had a better chance to learn the cad package trough...
Here will I place a few videos that I have done that do not follow any them.